Decoder-instellingen
Programmeren van een decoder doe je met het instellen Configuratie Variabelen (CV's). Bepaalde CV's zijn standaard voor elke decoder. Er zijn onderling afspraken gemaakt waaraan leveranciers zich moeten houden. Deze staan in de NMRA standaarden. Hieronder worden een aantal basic CV's genoemd die voor alle decoders gelden.
CV2 is de Vstart, het startmoment of de kick start genoemd. Hiermee wordt bepaald wanneer de locomotief, bij stap 1, gaat rijden. Hiermee wordt voorkomen dat er in het eerste stuk op de regelaar een dood bereik aanwezig is. Soms is een motor zo goed dat het startmoment of de kickstart op nul kan blijven staan. Een vast gegeven is hier niet voor. Dit moet proefondervindelijk per locomotief uitgevonden worden.
CV5 bepaalt de maximale snelheid waarmee een locomotief mag/kan rijden. Een Duitse KOF wordt alleen gebruikt voor het rangeren en zal dus geen 120 Km/u rijden. CV5 zal daarom veel lager ingesteld moeten worden. Een E103 rijdt zo’n 200 Km/u waardoor CV5 maximaal ingesteld kan worden.
Basis de- en acceleratie
CV6 bepaalt de Vmid. Dat wil zeggen de balans tussen een regelbereik van langzaam optrekken tot aan het eind dat de maximale snelheid is bereikt op je regelaar. Wanneer CV6 te hoog staat ingesteld, dan zal het langzaam optrekken zeer traag en over een groot regelbereik gaan, terwijl het op snelheid maken naar de maximale snelheid een zeer kort bereik heeft op de regelaar. Het regelbereik verloopt dan niet lineair. Wanneer CV6 te laag staat ingesteld, dan is er een zeer kort regelbereik voor het langzaam optrekken van de locomotief en zal waarschijnlijk de maximale snelheid ook niet gehaald worden. CV6 dient ¼ tot ⅓ van de maximale snelheid ingesteld te worden. Maar er zijn uitzonderingen die soms tot op de helft ingesteld moet worden. Dit is meestal afhankelijk van hoe goed de kwaliteit van de elektromotor is.
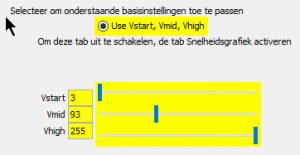
Basis CV 2-5-6
De- acceleratie
CV3 bepaalt de acceleratie ofwel de versnelling vanaf moment nul. Een personentrein zal sneller accelereren dan een goederentrein. Voor iedere locomotief is dit weer anders. Maak er geen formule-1 locomotief van.
CV4 bepaalt het de-accelereren ofwel het afremmen. Houdt de waarde hiervan kleiner dan bij CV3, mede ingeval van snelremmen. Een te lange uitloop is ook niet realistisch.
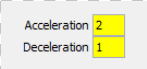
Basis CV 3-4
Er zijn DCC-decoders waarbij de pulsbreedte sturing voor de gelijkstroommotor ingesteld kan worden. De motor krijgt altijd een vaste spanning toegevoerd van een bepaalde waarde die ligt tussen de 12 Volt en 14 Volt in de schaal H0, afhankelijk van welk merk commando centrale er gebruikt wordt. De DCC-decoder stuurt pulsen met een frequentie tussen de 17 en 40 KHz naar de motor, dit is ook weer afhankelijk van het merk DCC-decoder. Bij een zeer smalle puls, of geen puls, zal de locomotief stilstaan. Hoe breder de puls wordt, door het draaien aan de rijregelaar, zal de locomotief ook sneller gaan rijden. Bij een te lage frequentie van de puls breedte sturing kan de motor gaan zingen bij het optrekken wat later weer verdwijnt als de locomotief op snelheid is gekomen. De regel is dat men het beste een hoge frequentie, 40 KHz, kan gebruiken des te soepeler rijdt een locomotief of treinstel. Maar er zijn uitzonderingen mogelijk. Het cv-nummer is per fabrikant verschillend hiervoor.
Rijstappentabel
Wanneer met CV3, CV4, CV5 en CV6 niet het gewenste resultaat kan worden bereikt, dan kan men gebruiken maken van de rijstappentabel. Hier kan dan elke rijstap individueel worden vastgelegd, of zelfs middels een bepaalde kromme. Logaritmisch positief of logaritmisch negatief is zelfs mogelijk. Dit zijn de CV’s 67 tot en met 94. Dit is nagenoeg bij elke fabrikant dezelfde reeks CV’s.
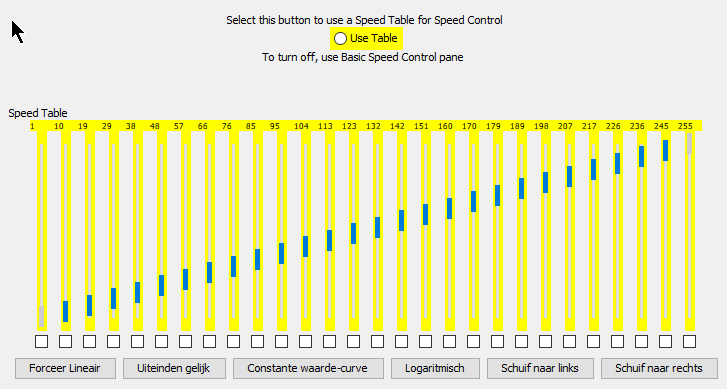
Basis Rijstappen tabel
Last regeling
Een gelijkstroommotor wekt in zichzelf ook een spanning op tijdens het draaien. Ook wel tegen-EMK genoemd. In Nederland noemen we dit EMK (Electro Motorische Kracht). De Amerikanen noemen dit Back-EMF. Dit komt door diezelfde magneten.
Een DCC-decoder meet deze spanning en vertaalt dat als zijnde de snelheid van de locomotief. Dit meten kan bij de ene DCC-decoder tussen elke puls doorgaan, maar bij een ander merk DCC-decoder kan dit meten om de 2, 3, of 4 pulsen gaan. Soms is deze meting instelbaar.
Het verschil tussen de ingestelde locomotief snelheid en de gemeten locomotief snelheid wordt bij geregeld. Dit kan aan de hand van het zogenaamde foutsignaal waardoor de regeling fel kan reageren of door een wijziging van de meetwaarde. Bij dit laatste zal de regeling rustiger reageren. Elke fabrikant bepaald zelf hoe hij de DCC-decoder hiervoor ontwerpt.
BEMF is aan of uit te schakelen. Ook is het mogelijk dat fabrikanten de BEMF instelbaar maken. De gebruiker kan dan zelf kiezen tot welk punt de BEMF nodig is. Dit is in een cv-nummer ondergebracht.
ESU DCC decoder
CV53 = 140. Dit is de spanning waarmee de lay-out gevoed wordt. Dit is namelijk in dit geval 14 Volt. Wanneer op de regelaar het laatste deel niet meer regelbaar is, dus geen snelheidsverandering plaats vindt, dan moet die waarde verminderd worden.
CV54 = 50 parameter “K”. Hoe hoger deze waarde, hoe sterker de decoder de motor wil bijregelen. Soms kan dit gepaard gaan met schokken. Dan zal de waarde verminderd moeten worden. Ook hier is er geen vast gegeven voor en moet dit proefondervindelijk ingesteld worden.
CV55 = 100, parameter “I”. Deze waarde verminderen bij een groot vliegwiel en omgekeerd bij een klein of geen vliegwiel. Ook hier is er geen vast gegeven voor en moet dit proefondervindelijk ingesteld worden.
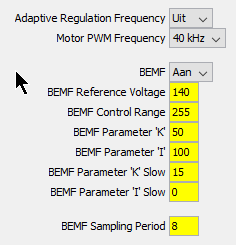
Basis ESU v4 BEMF
ZIMO
CV9 = 55 default, (aanbevolen). Hiermee wordt het aantal keren Back-EMF gemeten, maar ook de tussen pozen tussen de motorpulsen door. Hier is geen standaard gegeven voor per motor en moet proefondervindelijk ingesteld worden.
CV58 = 255 default, (aanbevolen). Back-EMF-intensiteit. Totaal constant houden van de snelheid indien de motor het vermogen kan leveren. Door een lagere waarde in te stellen, verdwijnt de BEMF in de hogere rij instelling en zal handmatig de snelheid bijgeregeld moeten worden.
CV56 = 55 default, (aanbevolen). Instelling voor het gelijkmatig rijden zonder hikken of sprongen te maken bij het langzaam rijden tot ongeveer de helft van de maximale snelheid. Dit is de meest moeilijke instelling voor motoren met een recht ankerblikpakket. Dit kan soms 2 uur duren voordat de juiste instelling is gevonden en moet dus proefondervindelijk gedaan worden.
LET OP: HET TESTEN HIERVOOR MOET OP DE MODELBAAN GEDAAN WORDEN EN NIET MET DE PROGRAMMER, OMDAT DIT SOMS EEN VERTEKEND BEELD GEEFT.
Bron: modelspoorbeurs.nl
Train-O-Matic
Voor deze decoders gecombineerd met nieuwe borstelloze motortjes van micromotor.eu en/of tramfabriek.nl zijn al voorgestelde cv waarden. Zie link bij tramfabriek.nl .